- Trang chủ
- Về chúng tôi
-
Giải pháp ngành

Sản xuất ô tô
Khu vực hàn
- Đo kích thước thân xe trực tuyến
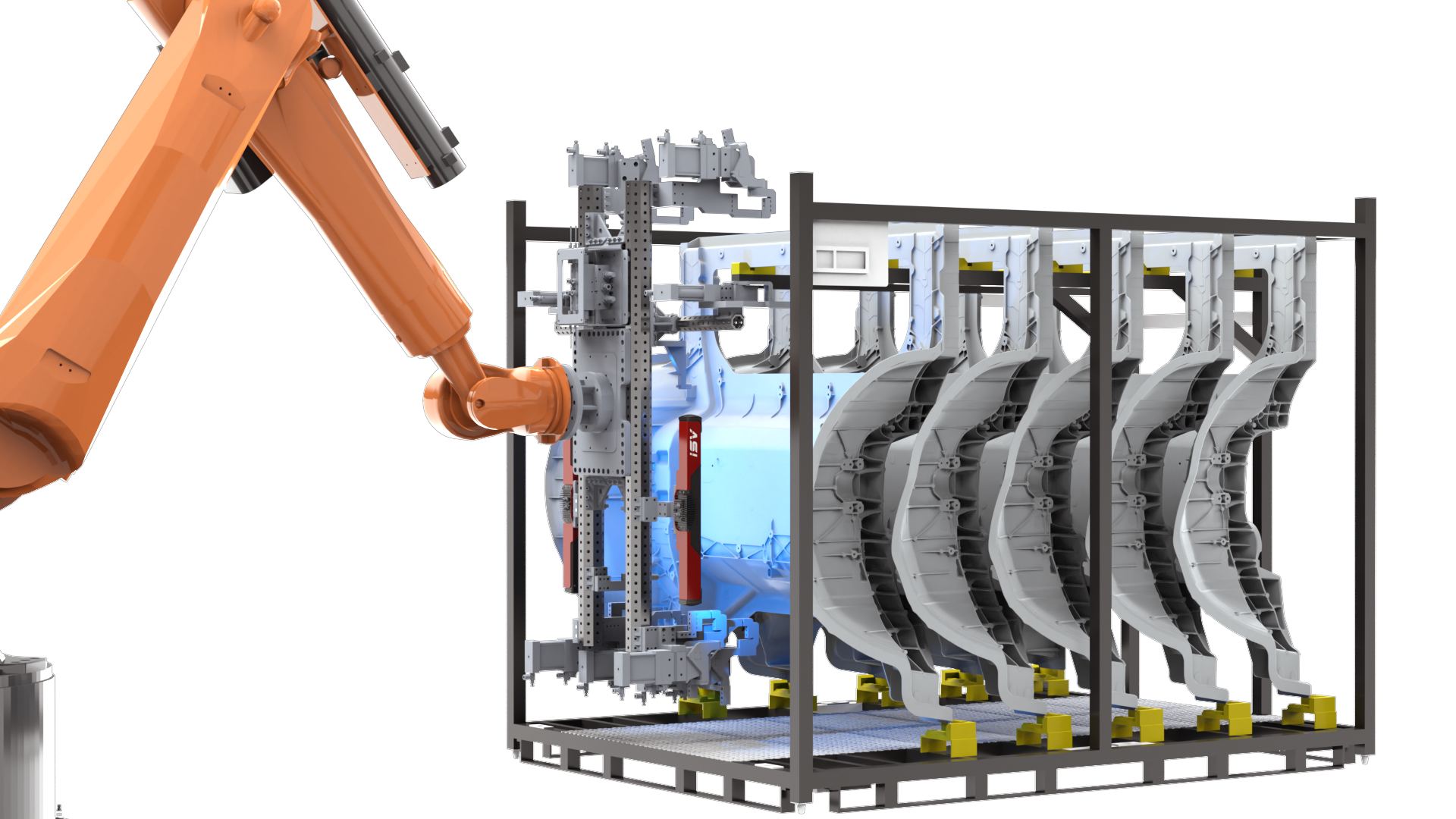
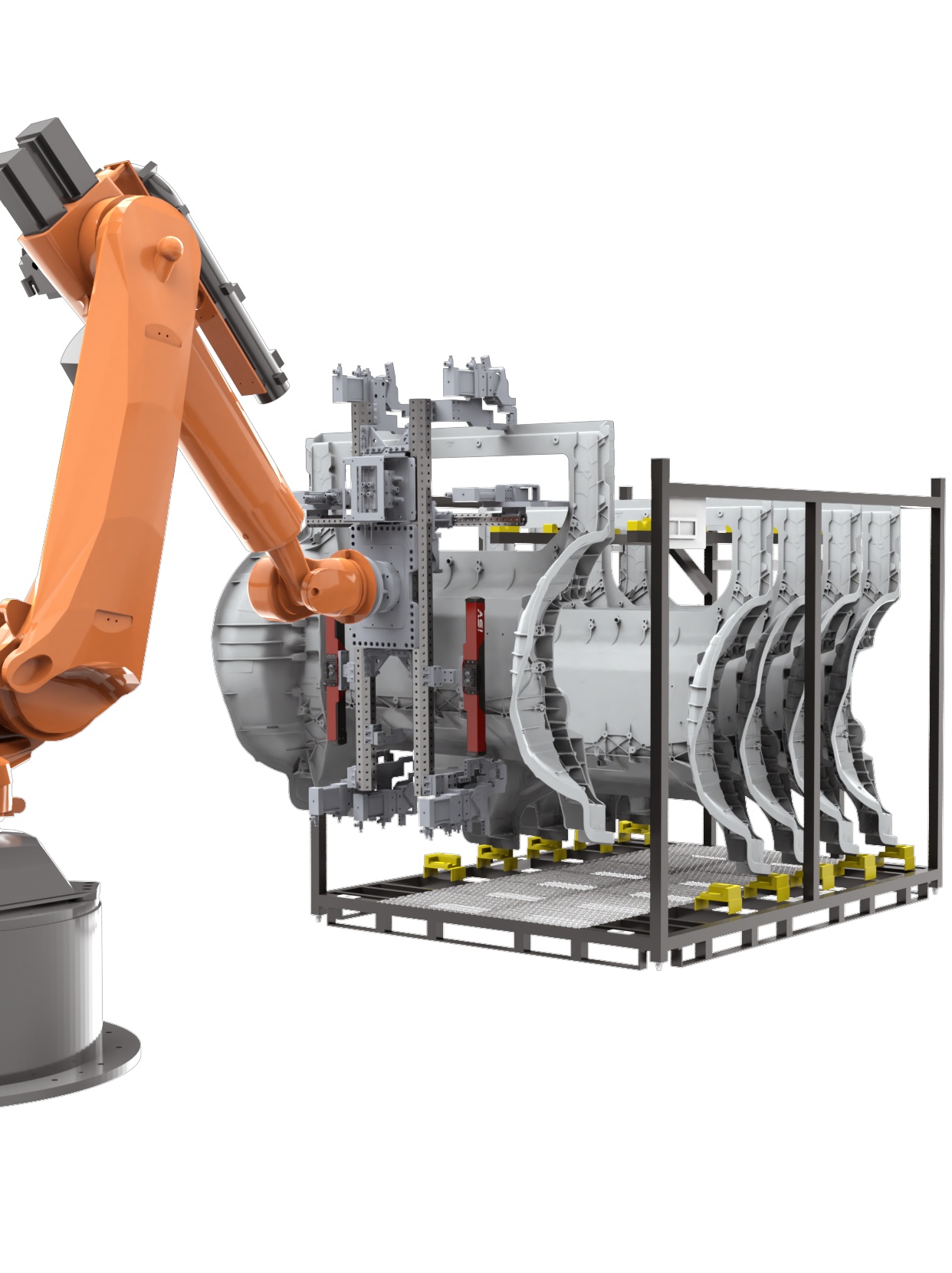
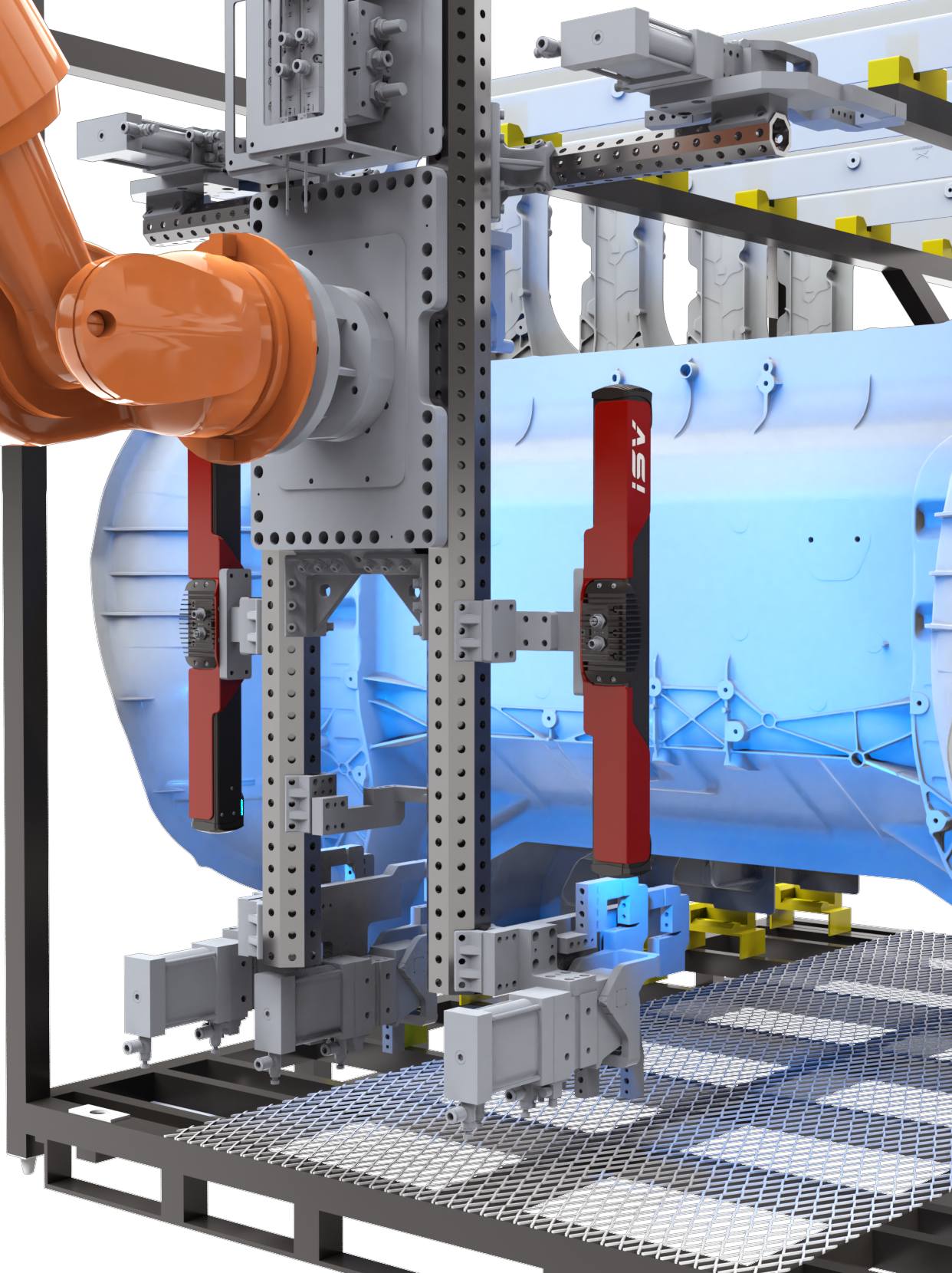
- Di chuyển và cấp liệu dẫn hướng bằng thị giác
- Lắp ráp tự động dẫn hướng bằng thị giác
- Kiểm tra chất lượng keo dán
- Định vị và hàn phụ trợ dẫn hướng bằng thị giác
- Kiểm tra chất lượng mối hàn
- Đo độ khe hở và mặt phẳng thân xe trắng
- Quy trình gia công dẫn hướng bằng thị giác
- Phát hiện có hay không của bu lông hàn
- Lĩnh vực ứng dụng
- Tuyển dụng nhân tài
- Liên hệ với chúng tôi